 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| image = | deepFlow2dImg (inImg1,inImg2) |
| image = | deepFlow2dImg (inImg1,inImg2,params) |
Computes a dense optical flow occurred between two input images.
This algorithm computes the optical flow between 2 input images using the deep flow algorithm [1].
The optical flow is the apparent motion of objects that occurred between two images. It relies on the assumption of intensity conservation and can be expressed as:
![\[ I[x, y, t] = I[x+dx, y+dy, t+dt] \]](form_952.png)
where ![$I[x, y, t]$](form_953.png) is a pixel
is a pixel  in the image at the time
in the image at the time  ,
,  is the time between two frames and
is the time between two frames and  is the displacement that occurred during .
is the displacement that occurred during .
Assuming the displacement is small enough, this equation can be approximated by a first order Taylor expansion:
![\[ I(x+dx, y+dy, t+dt) = I(x, y, t) + \frac{\partial I}{\partial x} dx + \frac{\partial I}{\partial y} dy + \frac{\partial I}{\partial t} dt \]](form_956.png)
where  is the partial derivative of the image along the dimension
is the partial derivative of the image along the dimension  .
.
Dividing by and using the intensity conservation assumption, the equation becomes:
![\[ \frac{\partial I}{\partial x} u + \frac{\partial I}{\partial y} v + \frac{\partial I}{\partial t} = 0 \]](form_959.png)
where  and
and  .
.
This equation can not be directly solved since we only have one equation for 2 unknowns to estimate.
The DeepFlow is one of the several technics to solve the equation above. It is a variational method that integrates a multiscale approach to overcome the limit of small displacement assumption.
In this algorithm, solving the optical flow problem consists in minimizing the energy  defined as:
defined as:
![\[ E(u, v) = \int_\Omega E_D + \alpha E_S + \beta E_M dx \]](form_962.png)
where  is the energy of the data term, ensuring that the intensities stay close,
is the energy of the data term, ensuring that the intensities stay close,  represents the smoothing term, ensuring a local consistency of the flow gradient and
represents the smoothing term, ensuring a local consistency of the flow gradient and  is a matching term, ensuring that the estimated flow is close to the input a priori flow. In practice, this implementation stays to more standard variation model and ignores the mathcing term [2]. The equation becomes:
is a matching term, ensuring that the estimated flow is close to the input a priori flow. In practice, this implementation stays to more standard variation model and ignores the mathcing term [2]. The equation becomes:
![\[ E(u, v) = \int_\Omega E_D + \alpha E_S dx \]](form_966.png)
is iteratively minimized using a Successive Over-relaxation (SOR) approach, taking the flow estimated at the scale  as initialization of the estimation at the scale
as initialization of the estimation at the scale  .
.
The algorithm takes the following parameters:
 : the smoothness weight
: the smoothness weight : the color constancy weight (see [1] for more details)
: the color constancy weight (see [1] for more details) : the gradient constancy weight
: the gradient constancy weight : Relaxation factor in SOR
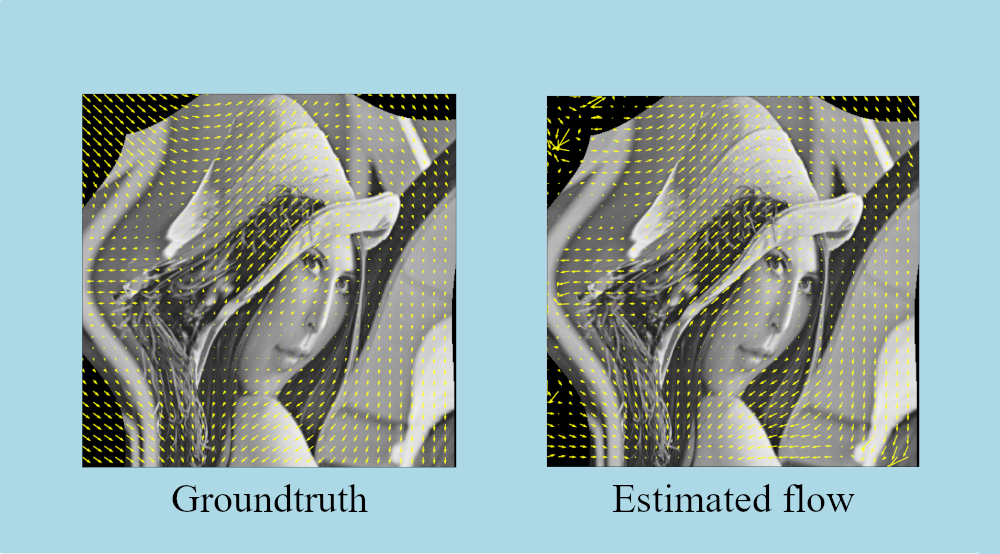
: Relaxation factor in SORThe figure below presents and example of flow estimation. A random and smooth deformation field was applied to the image of lena. The deep flow was calculated with the folowing parameters: 200 layers (maximum), downscale factor = 0.95, 5 fixed point iterations, 25 SOR iterations,  ,
,  ,
,  ,
,  :
:
[1] Philippe Weinzaepfel, Jerome Revaud, Zaid Harchaoui, and Cordelia Schmid. Deepflow: Large displacement optical flow with deep matching. In Computer Vision (ICCV), 2013 IEEE International Conference on, pages 1385�1392. IEEE, 2013.
[2] Brox, T., Bruhn, A., Papenberg, N., Weickert, J. (2004). High Accuracy Optical Flow Estimation Based on a Theory for Warping. In: Pajdla, T., Matas, J. (eds) Computer Vision - ECCV 2004. ECCV 2004.
