 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| Features2dGreySignature = | extractGreySignedFeatures2d (inImg,inNbFeatures) |
| Features2dGreySignature = | extractGreySignedFeatures2d (inImg,inGradStdDev,inNbFeatures,inFeaturesDist) |
| Features2dGreySignature = | extractGreySignedFeatures2d (inImg,inGradStdDev,inOptGradientGaussianCoverage,inCornerDetectionParams,inNbFeatures,inFeaturesDistX,inFeaturesDistY,inInterpolationPolicy,inSamplingBallInfo2d) |
algorithm allowing to extract 2d features associated to a grey signature from an image
This algorithm combines a feature detector algorithm (see Harris corner detection 2d) with a grey level feature signature algorithm allowing description of neighborhood of detected points.
Feature detector is controlled by following parameters :  ,
,  ,
,  ,
,  ,
,  and
and  . See Harris corner detection 2d for more informations on these parameters.
. See Harris corner detection 2d for more informations on these parameters.
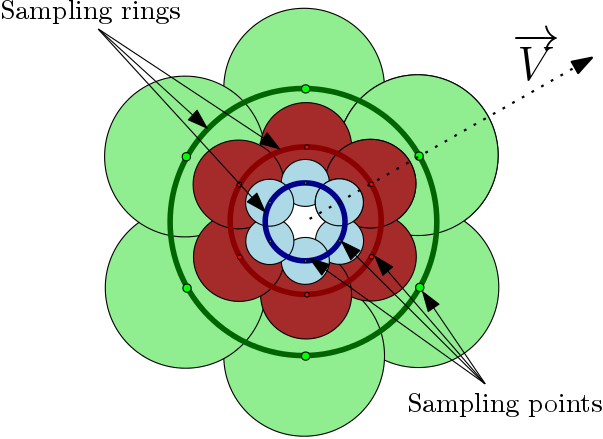
Local feature signature is computed using a "sampling ball" which is composed of rings centered at feature point. Each ring is associated to a radius, to a blurring factor (we sample blurred versions of input image  using Gaussian Smoothing 2d algorithm) and to a number of samples regularly dispatched around sampling ring. Angle of first sample
using Gaussian Smoothing 2d algorithm) and to a number of samples regularly dispatched around sampling ring. Angle of first sample  is defined using orientation of inertia tensor main direction. Note that blurr factor usually increase with sampling ring radius.
is defined using orientation of inertia tensor main direction. Note that blurr factor usually increase with sampling ring radius.
Sampling ball can be customized via parameter  . All extracted values are stacked into a single "by plane" data collection
. All extracted values are stacked into a single "by plane" data collection  .
.
Parameter  allows to specify an interpolation policy used during signature sampling.
allows to specify an interpolation policy used during signature sampling.
An optional scale factor  allows to generate comparable feature signatures for images with different scale factors (results of this algorithm are not scale invariant).
allows to generate comparable feature signatures for images with different scale factors (results of this algorithm are not scale invariant).
This algorithm is based on an adaptation of following work :
Nicolas Allezard, Michel Dhome, Frederic Jurie. Mise en correspondance multi-echelle. 17ieme Colloque sur le Traitement du Signal et des Images, Sep 1999, Vannes, France. Groupe d'Etudes du Traitement du Signal et des Images (GRETSI), pp.897–900, 1999.
