|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| xGradImg,yGradImg,zGradImg = | gaussianGradient3dImg (inImg3d,inStdDev) |
| xGradImg,yGradImg,zGradImg = | gaussianGradient3dImg (inImg3d,inStdDevX,inStdDevY,inStdDevZ,inOptGradientGaussianCoverage) |
| image = | gaussianXGradient3dImg (inImg3d,inStdDev) |
| image = | gaussianYGradient3dImg (inImg3d,inStdDev) |
| image = | gaussianZGradient3dImg (inImg3d,inStdDev) |
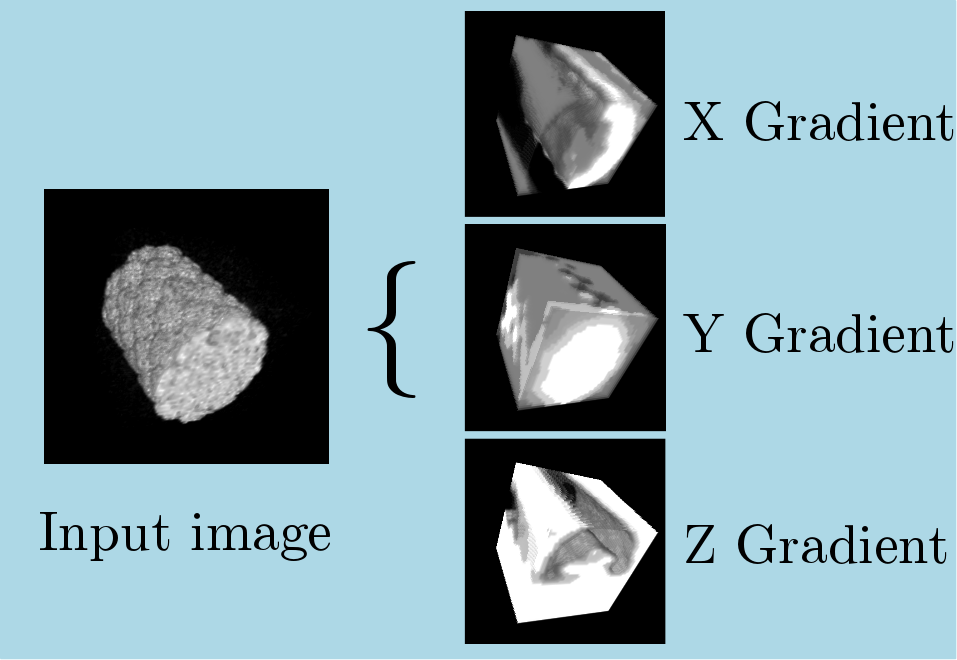
Compute X, Y and Z gradients of an input image convolving it with 3d Gaussian kernels.
Used Gaussian kernels  ,
,  and
and  coefficients are defined as follow :
coefficients are defined as follow :
![\[ GaussKnl^{X}_{XYZ}[o_x, o_y, o_z] = -\dfrac{o_x}{(2\pi)^\frac{3}{2}\sigma^5}e^{-\dfrac{o_x^2+o_y^2+o_z^2}{2\sigma^2}} \]](form_533.png)
![\[ GaussKnl^{Y}_{XYZ}[o_x, o_y, o_z] = -\dfrac{o_y}{(2\pi)^\frac{3}{2}\sigma^5}e^{-\dfrac{o_x^2+o_y^2+o_z^2}{2\sigma^2}} \]](form_534.png)
![\[ GaussKnl^{Z}_{XYZ}[o_x, o_y, o_z] = -\dfrac{o_z}{(2\pi)^\frac{3}{2}\sigma^5}e^{-\dfrac{o_x^2+o_y^2+o_z^2}{2\sigma^2}} \]](form_535.png)
where :
 is defined by InStdDev attribute
is defined by InStdDev attributeSize ![$[n_x, n_y, n_z]$](form_536.png) of this finite kernel is controlled by InOptGradientGaussianCoverage attribute.
of this finite kernel is controlled by InOptGradientGaussianCoverage attribute.
This parameter defined the minimum distribution spread ratio which should be reach regards to an infinite Gaussian distribution.
We define for example  such that :
such that :
![\[ n_x = \max(MinHalfKernelSize, \min(\{n\}\in \mathbb{N}^+) / \sum_{o_x=-\dfrac{n_x}{2}}^{\dfrac{n_x}{2}}{GaussKnl_X[o_x]}>= GaussianRatio \times \sum_{o_x=-\infty}^{+\infty}{GaussKnl_X[o_x]}) \]](form_525.png)
where :
![\[ GaussKnl_X[o_x] = \dfrac{1}{\sqrt{2\pi}\sigma}e^{-\dfrac{o_x^2}{2\sigma^2}} \]](form_526.png)
On output image values are given by:
![\[ OutOptGradXImg3d[x, y, z] = \sum_{o_z=-\dfrac{n_z}{2}}^{\dfrac{n_z}{2}}{\sum_{o_y=-\dfrac{n_y}{2}}^{\dfrac{n_y}{2}}{\sum_{o_x=-\dfrac{n_x}{2}}^{\dfrac{n_x}{2}}{InImg3d[x+o_x, y+o_y, z+o_z] \times GaussKnl^{X}_{XYZ}[o_x, o_y, o_z]}}} \]](form_537.png)
![\[ OutOptGradYImg3d[x, y, z] = \sum_{o_z=-\dfrac{n_z}{2}}^{\dfrac{n_z}{2}}{\sum_{o_y=-\dfrac{n_y}{2}}^{\dfrac{n_y}{2}}{\sum_{o_x=-\dfrac{n_x}{2}}^{\dfrac{n_x}{2}}{InImg3d[x+o_x, y+o_y, z+o_z] \times GaussKnl^{Y}_{XYZ}[o_x, o_y, o_z]}}} \]](form_538.png)
![\[ OutOptGradZImg3d[x, y, z] = \sum_{o_z=-\dfrac{n_z}{2}}^{\dfrac{n_z}{2}}{\sum_{o_y=-\dfrac{n_y}{2}}^{\dfrac{n_y}{2}}{\sum_{o_x=-\dfrac{n_x}{2}}^{\dfrac{n_x}{2}}{InImg3d[x+o_x, y+o_y, z+o_z] \times GaussKnl^{Z}_{XYZ}[o_x, o_y, o_z]}}} \]](form_539.png)
A detailled analysis of this filter has been done in J. Canny (1986) "A computational approach to edge detection", IEEE Trans. Pattern Analysis and Machine Intelligence, vol 8, pages 679-714.
Output images OutOptGradXImg3d, OutOptGradYImg3d and OutOptGradZImg3d are optional (at least one must be provided). Input and output images must have same size.
Here is an example of a Gaussian gradient operation applied to an 8-bits grey levels input image (with  ):
):