|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| hxxImg,hxyImg,hyyImg = | gaussianHessian2dImg (inImg,inStdDev) |
| hxxImg,hxyImg,hyyImg = | gaussianHessian2dImg (inImg,inStdDevX,inStdDevY,inOptHessianGaussianCoverage) |
Gaussian filter used to compute Hessian on a 2d image.
Used Gaussian Hessian kernel  ,
,  and
and  coefficients are defined as follow :
coefficients are defined as follow :
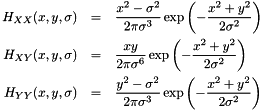
where  is defined by InStdDev attribute. The size
is defined by InStdDev attribute. The size ![$[n_x, n_y]$](form_523.png) of this finite kernel is controlled by InOptGradientGaussianCoverage attribute and is at least
of this finite kernel is controlled by InOptGradientGaussianCoverage attribute and is at least  in each direction.
in each direction.
This parameter defined the minimum distribution spread ratio which should be reach regards to an infinite Gaussian distribution. We define for example  such that :
such that :
![\[ n_x = \max(MinHalfKernelSize, \min(\{n\}\in \mathbb{N}^+) / \sum_{o_x=-\frac{n_x}{2}}^{\frac{n_x}{2}}{GaussKnl_X[o_x]} \geq GaussianRatio \times \sum_{o_x=-\infty}^{+\infty}{GaussKnl_X[o_x]}) \]](form_545.png)
where :
![\[ GaussKnl_X[o_x] = \frac{1}{\sqrt{2\pi}\sigma}e^{-\frac{o_x^2}{2\sigma^2}} \]](form_546.png)
The algorithm uses a separable approach in order to reduce the number of operations. Let's consider the three 1d filters  ,
,  and
and  along the x-axis:
along the x-axis:
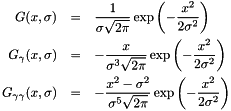
Where  correspond to the x- or y-direction. The filters are transposed to get the filter along the y-axis.
correspond to the x- or y-direction. The filters are transposed to get the filter along the y-axis.
For a given standard deviation , the output images OutHxxImg, OutHyyImg and OutHxyImg are calculated as follows:

Where  is the convolution operator.
is the convolution operator.
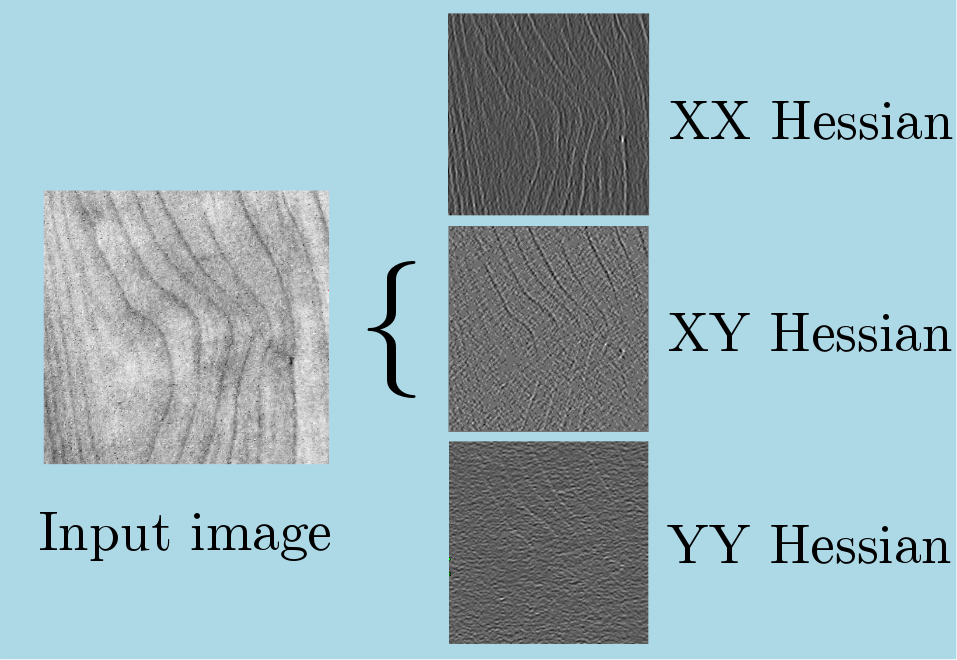
Here is an example of a Gaussian Hessian operation applied to an 8-bits grey levels input image (with  ):
):