 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| hxxImg,hxyImg,hxzImg,hyyImg,hyzImg,hzzImg = | gaussianHessian3dImg (inImg,inStdDev) |
| hxxImg,hxyImg,hxzImg,hyyImg,hyzImg,hzzImg = | gaussianHessian3dImg (inImg,inStdDevX,inStdDevY,inStdDevZ,inOptHessianGaussianCoverage) |
Gaussian filter used to compute Hessian on a 3d image.
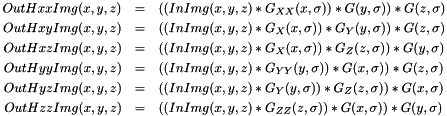
The GaussianHessian3dImg algorithm uses separable Gaussian derivarive and smoothing filters to compute the Hessian matrix coefficient on each voxels.
Let's consider the three 1d filters  ,
,  and
and  along the direction
along the direction  :
:
is a smoothing function , is the first order gaussian derivative and is the second order Gaussian derivative along the directon  , .
, .
The kernels used for these filters have a size of  . The Hessian coefficients are caultulated by a combination of these kernels:
. The Hessian coefficients are caultulated by a combination of these kernels:
See Gaussian Hessian 2d for an illustration of a 2d Gaussian Hessian result.
