|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| Inertia2dData = | greyInertiaMsr2d (inImg) |
| Inertia2dData = | greyInertiaMsr2d (inImg,inMaskImg) |
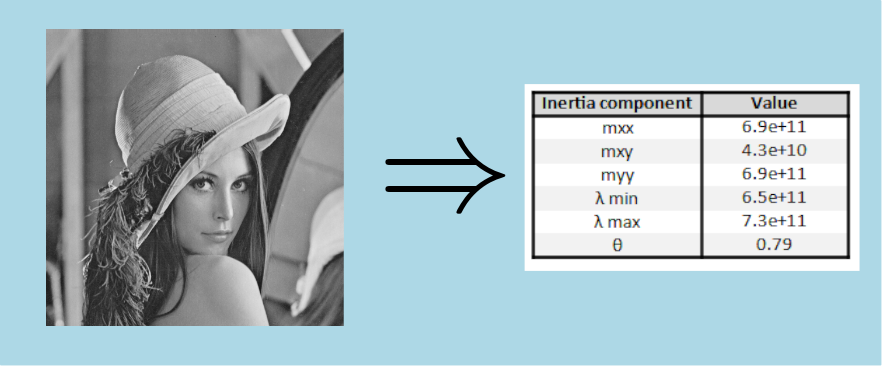
Computes the global inertia based on the grey levels of the input 2D image.
This algorithm computes the second order central moment for the entire image, ponderated by the pixels intensities, thanks to the inertia matrix  .
.
![\[ M = \begin{bmatrix} m_{xx} & m_{xy} \\ m_{yx} & m_{yy} \end{bmatrix} \]](form_789.png)
Whose components are computed as follows :
![\[ \begin{array}{r c l} m_{xx} & = & \sum_{\lbrace x, y \rbrace \in \Omega}{ \left(x - \bar{x} \right)^2 I(x, y)} \\ m_{xy} = m_{yx} & = & \sum_{\lbrace x, y \rbrace \in \Omega}{ \left(x - \bar{x} \right) \left(y - \bar{y} \right) I(x, y)} \\ m_{yy} & = & \sum_{\lbrace x, y \rbrace \in \Omega}{ \left(y - \bar{y} \right)^2 I(x, y)}\\ \end{array} \]](form_790.png)
Where  is the image intensity at the position
is the image intensity at the position  ,
,  and
and  are the grey barycenter coordinates and
are the grey barycenter coordinates and  is the set of pixel coordinates in the image.
is the set of pixel coordinates in the image.
From these composents, three descriptors are extracted : the minimum and maximum eigen values of (  and
and  ) and the global orientation
) and the global orientation  .
.
These features are calculated as follows :
![\[ \begin{array}{r c l} \delta & = & \sqrt{(m_{xx} - m_{yy}) (m_{xx} - m_{yy}) + 4 m_{xy} m_{xy}} \\ \lambda_{Max} & = & \frac{1}{2} \left( m_{xx} + m_{yy} + \delta \right) \\ \lambda_{Min} & = & \frac{1}{2} \left( m_{xx} + m_{yy} - \delta \right) \\ \theta & = & \tan^{-1} \left( \frac{\lambda_{Max} - m_{xx}}{m_{xy}} \right) \end{array} \]](form_797.png)
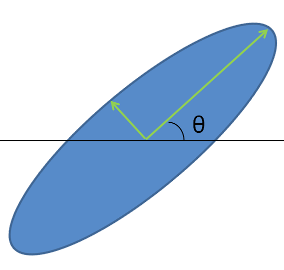
and are proportional to the squared length of the eigenvector axes, represented by green arrows in the figure below.
Here is an example of result for a grey level image: