 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
Measure allowing to compute the second order moment ponderated by the gray level of each pixel for shape.
The GreyInertia measurement computes the second order central moment for each shape, ponderated by the voxels intensities, thanks to the inertia matrix  .
.
![\[ M = \begin{bmatrix} m_{xx} & m_{xy} & m_{xz} \\ m_{yx} & m_{yy} & m_{yz} \\ m_{zx} & m_{zy} & m_{zz} \end{bmatrix} \]](form_798.png)
Whose components are computed as follows :
![\[ \begin{array}{r c l} m_{xx} & = & \sum_{\lbrace x, y, z \rbrace \in Shape}{ \left(x - \bar{x} \right)^2 I(x, y, z)} \\ m_{xy} = m_{yx} & = & \sum_{\lbrace x, y, z \rbrace \in Shape}{ \left(x - \bar{x} \right) \left(y - \bar{y} \right) I(x, y, z)} \\ m_{xz} = m_{zx} & = & \sum_{\lbrace x, y, z \rbrace \in Shape}{ \left(x - \bar{x} \right) \left(z - \bar{z} \right) I(x, y, z)} \\ m_{yy} & = & \sum_{\lbrace x, y, z \rbrace \in Shape}{ \left(y - \bar{y} \right)^2 I(x, y, z)}\\ m_{yz} = m_{zy} & = & \sum_{\lbrace x, y, z \rbrace \in Shape}{ \left(y - \bar{y} \right) \left(z - \bar{z} \right) I(x, y, z)} \\ m_{zz} = m_{zz} & = & \sum_{\lbrace x, y, z \rbrace \in Shape}{ \left(z - \bar{z} \right) \left(z - \bar{z} \right) I(x, y, z)} \end{array} \]](form_1114.png)
Where  is the image intensity at the position
is the image intensity at the position  ,
,  ,
,  and
and  are the grey barycenter coordinates (see GreyBarycenter) and
are the grey barycenter coordinates (see GreyBarycenter) and  is the voxel collection of the current shape.
is the voxel collection of the current shape.
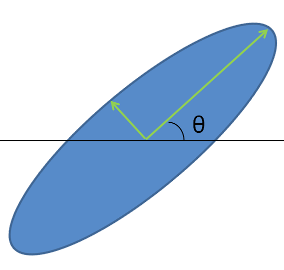
From these composents, three descriptors are extracted in 2d : the minimum and maximum eigen values of (  and
and  ) and the shape orientation
) and the shape orientation  .
.
These features are calculated as follows :
![\[ \begin{array}{r c l} \delta & = & \sqrt{(m_{xx} - m_{yy}) (m_{xx} - m_{yy}) + 4 m_{xy} m_{xy}} \\ \lambda_{Max} & = & \frac{1}{2} \left( m_{xx} + m_{yy} + \delta \right) \\ \lambda_{Min} & = & \frac{1}{2} \left( m_{xx} + m_{yy} - \delta \right) \\ \theta & = & \tan^{-1} \left( \frac{\lambda_{Max} - m_{xx}}{m_{xy}} \right) \end{array} \]](form_797.png)
and are proportional to the squared length of the eigenvector axes, represented by green arrows in the figure below.
In 3d case, other features are available. They are calculated as follows :
![\[ \begin{array}{r c l} q & = & \frac{m_{xx} + m_{yy} + m_{zz}}{3} \\ p & = & \sqrt{\frac{(m_{xx} - q)^2 + (m_{yy} - q)^2 + (m_{zz} - q)^2 + 2 (m_{xy}^2 + m_{xz}^2 + m_{yz}^2)}{6}} \\ \lambda_{Max} & = & q + 2 p \cos(\phi + 2 \pi / 3) \\ \lambda_{Inter} & = & q + 2 p \cos(\phi - 2 \pi / 3) \\ \lambda_{Min} & = & q + 2 p \cos(\phi) \end{array} \]](form_1115.png)
Where :
![\[ \phi = \begin{cases} \pi/3& \text{if } r \leq -1 \\ 0 & \text{if } r \geq 1\\ \frac{\cos^{-1}(r)}{3} &\text{otherwise} \end{cases} \]](form_1116.png)
And
![\[ r = \frac{(m_{xx} - q)(m_{yy} - q)(m_{zz} - q) + 2 m_{xy} m_{xz}m_{yz} - (m_{yy} - q) m_{xz}^2 - (m_{zz} - q) m_{xy}^2 - (m_{xx} - q) m_{yz}^2}{2 p^3} \]](form_1117.png)
Moreover, the 2d rotation angle  is replaced by the 3d rotation angles
is replaced by the 3d rotation angles  ,
,  and
and  , calculated with the coefficients of
, calculated with the coefficients of  :
:
![\[ \begin{array}{r c l} \alpha & = & \tan^{-1} \left( \frac{m_{yz}}{m_{zz}} \right) \\ \beta & = & - \sin \left( m_{xz} \right) \\ \chi & = & \tan^{-1} \left( \frac{m_{xy}}{m_{xx}} \right) \end{array} \]](form_1119.png)
Here is an example of the grey inertia calculated from a 2d input image :
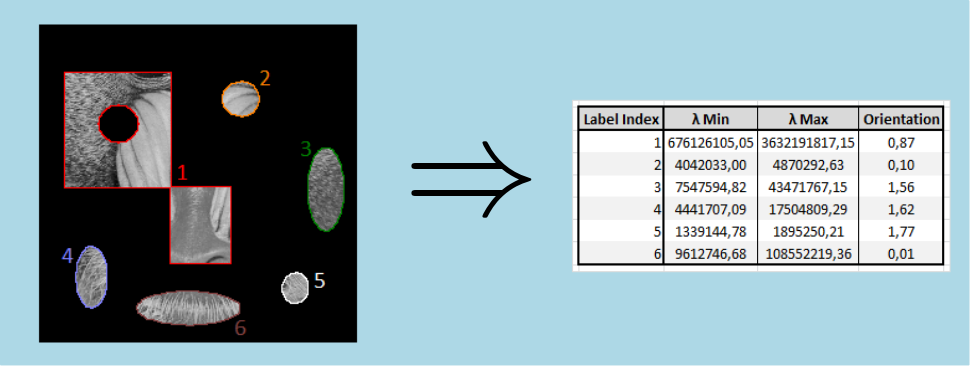
Measure allowing to compute the second order moment ponderated by the gray level of each pixel for shape
| Measure Type | Measure Unit Type | Parameter Type | Result Type | Shape Requirements |
|---|---|---|---|---|

Intensity | 
None |
None | 
Custom | 
Row Intersections |
Generic example in 2d case :
Generic example in 3d case :
IPSDKIPLShapeAnalysis
 1.8.14
1.8.14
