 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| image = | harrisCorner2dImg (inImg) |
| image = | harrisCorner2dImg (inImg,inGradStdDev) |
Computes the Harris corner detection response.
This algorithm computes the cornerness for each pixel of the input image, according to the Harris corner detector algorithm [1] or to the Shi-Tomasi [2] [3] corner detector algorithm (with respect to method contained by parameter  ).
).
The basic idea of the Harris corner detector is that a corner can be characterized by high intensity variation in all directions. It means that a pixel at position  is a corner if the energy
is a corner if the energy  , described by the following equation, reaches a maximum value compared to its neighbourhood
, described by the following equation, reaches a maximum value compared to its neighbourhood  :
:
![\[ E(u, v) = \sum_{x, y \in \aleph}{\omega(x, y) \left( InImg(x+u, y+v) - InImg(x, y) \right)^2} \]](form_328.png)
Where is the pixel's neighbourhood,  is the input image and
is the input image and  is the Gaussian coefficient at the position
is the Gaussian coefficient at the position  . The gaussian coefficients are computed using the parameters
. The gaussian coefficients are computed using the parameters  and
and  .
.
The energy can be approximated by a first order Taylor expansion :
![\[ E(u, v) \approx \left[ u, v \right] M \left[ \begin{array}{c} u \\ v \end{array} \right] \]](form_333.png)
Where
![\[ M = \sum_{x, y, \in \aleph}{\omega(x, y) \begin{bmatrix} I_x^2 & IxIy\\ IxIy & Iy^2 \end{bmatrix}} \]](form_334.png)
Where  and
and  are the spatial derivatives of the input image at the position along the directions x and y respectively. In this implementation, the spatial derivatives are computed using the Gaussian Gradient 2d algorithm.
are the spatial derivatives of the input image at the position along the directions x and y respectively. In this implementation, the spatial derivatives are computed using the Gaussian Gradient 2d algorithm.
 can be computed at the position by :
can be computed at the position by :
![\[ C(u, v) = det(M) - k \left( trace(M) \right)^2 \]](form_338.png)
 is the sensitivity contained by parameter ,
is the sensitivity contained by parameter ,  is the determinant of
is the determinant of  and
and  is the trace of . In order to fit into the output image range, the algorithm returns the square root of :
is the trace of . In order to fit into the output image range, the algorithm returns the square root of :
![\[ OutImg(u, v) = \sqrt{C(u, v)} \]](form_343.png)
can be computed at the position by :
![\[ C(u, v) = OutImg(u, v) = \min(\lambda_1, \lambda_2) \]](form_344.png)
 and
and  correspond to eigen values of matrix (in this case sensitivity contained by parameter is ignored).
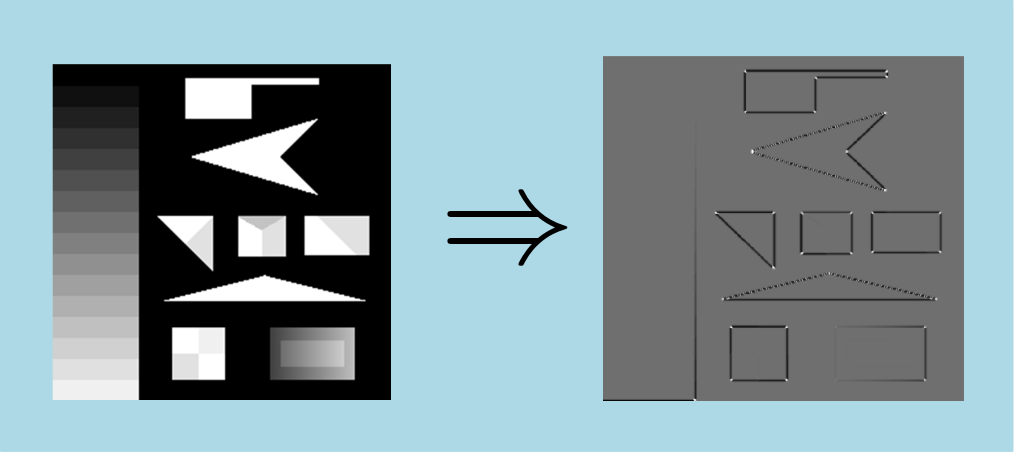
correspond to eigen values of matrix (in this case sensitivity contained by parameter is ignored).Here is an example of a 2d Harris cornerness calculation applied to an 8-bits grey level input image (with  and
and  ):
):
[1] C. Harris and M. Stephens (1988). "A combined corner and edge detector". Proceedings of the 4th Alvey Vision Conference. pp. 147 - 151.
[2] J. Shi and C. Tomasi (June 1994). "Good Features to Track". 9th IEEE Conference on Computer Vision and Pattern Recognition. Springer
[3] C. Tomasi and T. Kanade (2004). "Detection and Tracking of Point Features". Pattern Recognition. 37: 165 - 168
