 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
Measure allowing to compute the 3d shape normal orientation (theta component of the (phi, theta) representation) from the second order moment matrix computed from the Inertia3d measurement.
This measure computes the normal orientation value between the x-y plane and the z-axis of the inertia matrix calculated for each 3D shape, without taking the voxels intensities into account, and returns the phi component, expressed in radians.
This orientation is calculated from the eigen vector related to the minimum eignen value.
Typically, this measure is usefull to determinate the orientation of a flat disk, for which the orientation inside the disk plane is not relevant.
To avoid redundancies in the orienation representation, the measure ensure that for a couple of angles (  ,
,  ),
), ![$\theta \in [0, \pi/2]$](form_1094.png) . is hence adjusted by rotating to
. is hence adjusted by rotating to  if the initial value of
if the initial value of  .
.
Here is an example of theta orientation measurement :
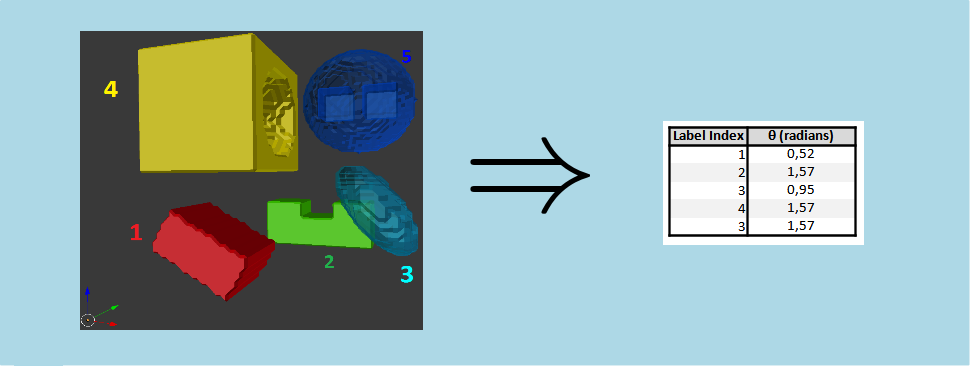
Measure allowing to compute the 3d shape normal orientation (theta component of the (phi, theta) representation) from the second order moment matrix computed from the Inertia3d measurement
| Measure Type | Measure Unit Type | Parameter Type | Result Type | Shape Requirements |
|---|---|---|---|---|

Generic | 
Angle | 
None | 
Value (ipsdk::ipReal64) | 
Row Intersections |
Generic example in 3d case :
IPSDKIPLShapeAnalysis
 1.8.14
1.8.14
