 |
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| classesImg,clustersCenters,compactness = | kMeansImg (inImg,nbClusters) |
| classesImg,clustersCenters,compactness = | kMeansImg (inImg,nbClusters,nbAttempts,nbMaxIterPerAttempt,centersShiftTol,outClassImg) |
| classesImg,clustersCenters,compactness = | kMeansImg (inImg,inOptSingleGreyMaskImg,nbClusters) |
| classesImg,clustersCenters,compactness = | kMeansImg (inImg,inOptSingleGreyMaskImg,nbClusters,nbAttempts,nbMaxIterPerAttempt,centersShiftTol,outClassImg) |
classifies pixels of an image using k-means algorithm
Classic K-means algorithm (LLoyd's algorithm) consists in clustering a set of n points of d dimensions in k clusters. Applied here to image processing, for an image of size (x, y, z, c, t) (with x, y and z the sizes respectively along x, y and z-axis, c the number of color channels and t the number of elements in temporal sequence), it will cluster the x*y*z pixels (for a 2d image, with z=1) or voxels (for a 3d image, with z>1) of c*t dimensions in k clusters, with k specified by the user.
The different steps are as follows:
For each attempt (number of attempts is specified by the user through the  attribute):
attribute):
 ; in that last case, the content of the attribute is taken as initial centers,
; in that last case, the content of the attribute is taken as initial centers, AND the number of iterations is lower than
AND the number of iterations is lower than 
Input and output attributes of the algorithm are:
 : the input image we want to classify the content,: number of different initializations of the clusters centers, that equals to 1 by default (if greater than one and if attribute is intitialized by the user, then the first attempt is initialized with clusters centers specified by the user, and for the next attempts clusters centers are automatically initialized using k-means ++ algorithm). If greater than 1, the solution minimizing the compactness is kept,: Number of maximum iterations for each attempt (if not initialized or set to 0 by the user, there is no limit on the number of maximum iterations; in other words, the loop of "assignment step"/"update step" sequences won't stop as long as centers displacements are greater than the threshold specified by the user),: maximal allowed clusters centers displacement between 2 iterations, under which we consider our current attempt converged (automatically set to 0.0001 if not initialized by user),
: the input image we want to classify the content,: number of different initializations of the clusters centers, that equals to 1 by default (if greater than one and if attribute is intitialized by the user, then the first attempt is initialized with clusters centers specified by the user, and for the next attempts clusters centers are automatically initialized using k-means ++ algorithm). If greater than 1, the solution minimizing the compactness is kept,: Number of maximum iterations for each attempt (if not initialized or set to 0 by the user, there is no limit on the number of maximum iterations; in other words, the loop of "assignment step"/"update step" sequences won't stop as long as centers displacements are greater than the threshold specified by the user),: maximal allowed clusters centers displacement between 2 iterations, under which we consider our current attempt converged (automatically set to 0.0001 if not initialized by user), : collection of initial clusters centers for the first attempt. If this attribute is not initialized, clusters centers for the first attempt will be automatically initialized by the algorithm using the K-means ++ method. This attribute is also updated by the algorithm, with the properties of the resulting clusters,
: collection of initial clusters centers for the first attempt. If this attribute is not initialized, clusters centers for the first attempt will be automatically initialized by the algorithm using the K-means ++ method. This attribute is also updated by the algorithm, with the properties of the resulting clusters, : Number of clusters expected by the user; this parameter is ignored if is initialized; at least one of these 2 parameters has to be initialized,
: Number of clusters expected by the user; this parameter is ignored if is initialized; at least one of these 2 parameters has to be initialized, : compactness of the retained solution,
: compactness of the retained solution, : optional, will be used by the algorithm for its internal computation. It will be used only if the number of attempts is greater than 1. If the number of attempts is greater than 1 and if this image is not provided by the user, it will be automatically be allocated by the algorithm itself,
: optional, will be used by the algorithm for its internal computation. It will be used only if the number of attempts is greater than 1. If the number of attempts is greater than 1 and if this image is not provided by the user, it will be automatically be allocated by the algorithm itself, : Image of identifiers of clusters for each pixel/voxel (identifiers in range [0..nbClusters-1]),
: Image of identifiers of clusters for each pixel/voxel (identifiers in range [0..nbClusters-1]), : optional; image where pixels/voxels values are replaced with their associated cluster center.
: optional; image where pixels/voxels values are replaced with their associated cluster center.Below is an example of the application of k-means algorithm on a RGB UInt8 image, with the following parameters: ( =4, =1, =100, =0.01):

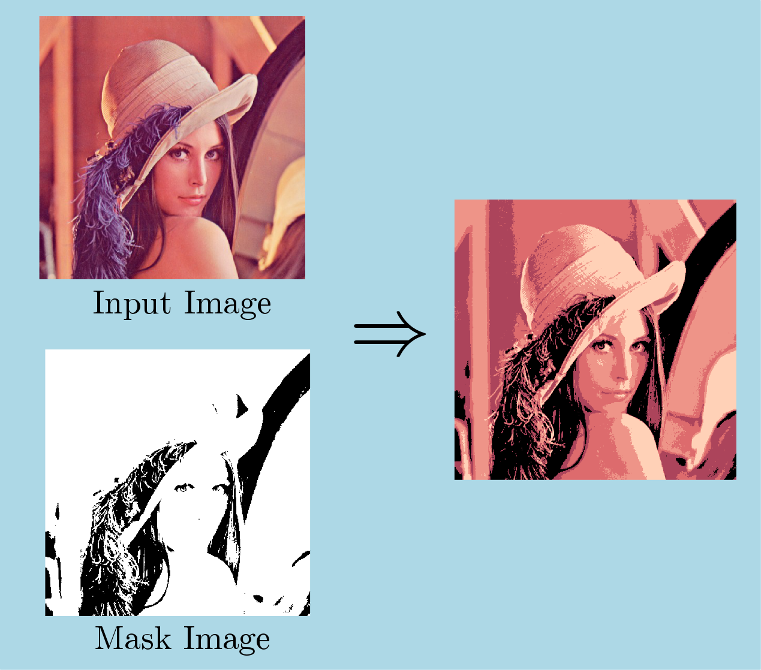
The algorithm allows to classify only a subset of pixels/voxels by using a mask image as additional input. In this case, only the pixels/voxels with a mask value of True are classified and taken into account for the clusters calculation.
Here is an example of masked k-means based classification, using the same parameters as for the previous figure. Black pixels correspond to a value of False in the mask image:
[1] Stuart P. Lloyd. Least squares quantization in pcm. IEEE Transactions on Information Theory, 28(2):129–136, 1982.
