|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.2
IPSDK : Image Processing Software Development Kit
|
| image = | warp3dImg (inImg,inWarpMotionTransform3d) |
| image = | warp3dImg (inImg,inWarpMotionTransform3d,inOptInterpolationPolicy) |
algorithm allowing to apply a motion transformation warping operation on a 3d image
This algorithm allows to apply a motion transformation defined by parameter  on an input image
on an input image  . Available warping transformations are defined by enumerate ipsdk::math::transform::eGeometricTransform3dType.
. Available warping transformations are defined by enumerate ipsdk::math::transform::eGeometricTransform3dType.
Interpolation policy used during processing is defined by optional input parameter  (see ipsdk::imaproc::attr::eInterpolationPolicy).
(see ipsdk::imaproc::attr::eInterpolationPolicy).
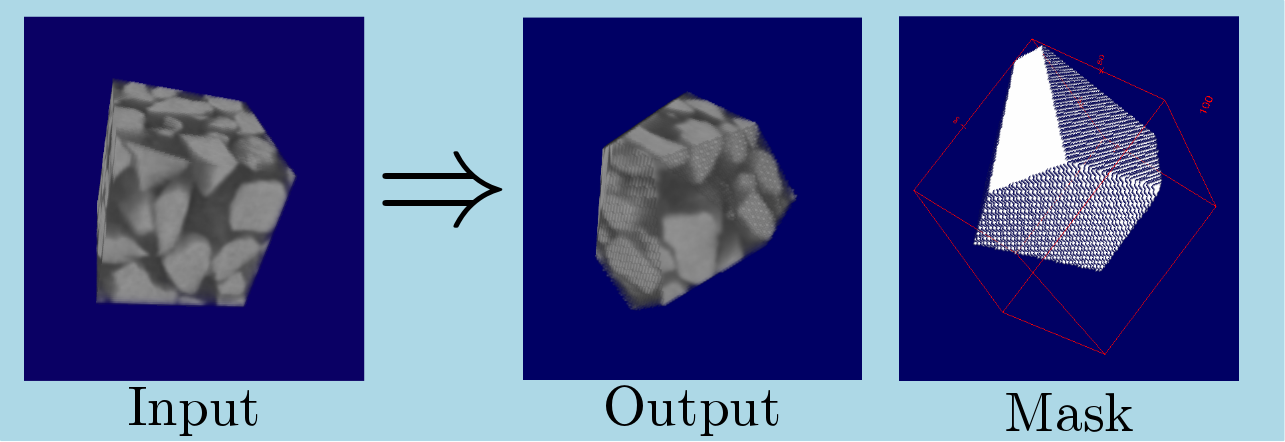
On output, algorithm generates requested warped image  and optionally output mask image
and optionally output mask image  . Size of output image is not ruled :
. Size of output image is not ruled :
This process is illustrated in 2d case : see Warping 2d algorithm.
If output image is not provided by user, a default output image size is computed using computeWarpedDefaultSize function.
Here is an example of application of Warp3dImg algorithm on a 3d image in case of a centered rotation :